 案例详情
案例详情

 19872700032
19872700032
19872700032
19872700032
 新闻资讯3d建模3d点云扫描
新闻资讯3d建模3d点云扫描 官方公告
官方公告 行业资讯
行业资讯 技术分享3d高斯泼溅乡镇倾斜摄影电站倾斜摄影三维数据采集城市倾斜摄影交通倾斜摄影工厂倾斜摄影校园倾斜摄影景区3d点云扫描园区3d点云扫描园区倾斜摄影装饰品效果图企业/展品3D视频问题列表
技术分享3d高斯泼溅乡镇倾斜摄影电站倾斜摄影三维数据采集城市倾斜摄影交通倾斜摄影工厂倾斜摄影校园倾斜摄影景区3d点云扫描园区3d点云扫描园区倾斜摄影装饰品效果图企业/展品3D视频问题列表 变电站3D建模
变电站3D建模 交通3d点云扫描三维场景建模
交通3d点云扫描三维场景建模 产品3d点云扫描发电厂3d建模光伏3d建模风电场3D建模储能站建模水电站3d建模地产倾斜摄影机房3d建模景区倾斜摄影家具建模设备建模建筑建模产品建模展馆建模爆炸效果图剖面效果图装修效果图建筑效果图鸟瞰效果图
产品3d点云扫描发电厂3d建模光伏3d建模风电场3D建模储能站建模水电站3d建模地产倾斜摄影机房3d建模景区倾斜摄影家具建模设备建模建筑建模产品建模展馆建模爆炸效果图剖面效果图装修效果图建筑效果图鸟瞰效果图 VR校园全景充电桩3d建模3D可视化建模园区建筑建模工业设备建模文化旅游建模电站能源建模工厂车间建模电商三维建模天猫淘宝建模京东AR建模产品3D建模文物3d点云扫描倾斜摄影建模VR线上展会汽车3D展馆VR艺术展馆VR党建展厅VR博物馆精品案例3D可视化建模园区建筑建模工业设备建模变电站3D建模工厂可视化建模电商三维建模阿里躺平建模京东AR建模产品3d建模文物扫描建模倾斜摄影3D可视化建模电站3d点云扫描工厂3d点云扫描360环物拍摄全景VR拍摄3D效果图制作交通运输建模家具效果图产品效果图工厂效果图医疗健康建模医疗设备建模医疗场景建模工业园区建模办公园区建模商业园区建模住宅园区建模教育园区建模物流园区建模制造业3D建模重工业3D建模轻工业3D建模环保业3D建模
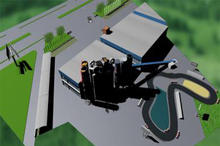
VR校园全景充电桩3d建模3D可视化建模园区建筑建模工业设备建模文化旅游建模电站能源建模工厂车间建模电商三维建模天猫淘宝建模京东AR建模产品3D建模文物3d点云扫描倾斜摄影建模VR线上展会汽车3D展馆VR艺术展馆VR党建展厅VR博物馆精品案例3D可视化建模园区建筑建模工业设备建模变电站3D建模工厂可视化建模电商三维建模阿里躺平建模京东AR建模产品3d建模文物扫描建模倾斜摄影3D可视化建模电站3d点云扫描工厂3d点云扫描360环物拍摄全景VR拍摄3D效果图制作交通运输建模家具效果图产品效果图工厂效果图医疗健康建模医疗设备建模医疗场景建模工业园区建模办公园区建模商业园区建模住宅园区建模教育园区建模物流园区建模制造业3D建模重工业3D建模轻工业3D建模环保业3D建模三维扫描与3D点云技术的智慧路口建模方案,通过非接触式激光扫描快速获取路口全要素空间数据,结合可视化平台实现交通设施精准管理、信号优化与事故溯源,已成为提升城市交通治理能力的关键技术路径。
传统路口数据采集依赖人工测量与二维图纸,存在效率低、精度差、更新滞后等问题。三维扫描技术通过激光雷达、全景相机等设备,可在短时间内完成单个标准路口的全要素扫描,获取包括路面标线、信号灯位置、隔离栏高度、绿化带轮廓在内的毫米级精度点云数据。这种高精度数据能精准识别标线磨损、信号灯倾斜等细微缺陷,较人工巡查效率提升数倍,问题发现准确率大幅提高,为设施维护提供可靠依据。
3D点云数据为路口信号优化提供了动态分析基础。将扫描生成的数字模型与交通流量、天气等实时数据融合,可构建“数字孪生路口”。通过模拟不同时段车流轨迹,系统能动态调整信号灯配时方案,显著提升高峰时段路口通行能力,减少车辆平均等待时间。同时,点云数据支持对非机动车与行人行为的深度分析,可精准定位右转车辆与共享单车流的潜在冲突点,为优化非机动车道布局、降低事故风险提供科学支撑。

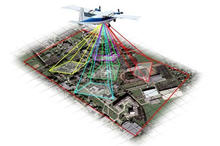
在事故处理与责任认定场景中,三维扫描的“时间冻结”能力凸显价值。传统事故勘查需人工测量现场痕迹,易受二次事故破坏。而采用无人机搭载激光雷达进行空中扫描,可快速完成事故现场全要素记录,生成包含车辆位置、刹车痕迹、散落物分布的3D模型。这种模型数据作为电子证据,能大幅缩短事故责任认定周期,提高认定结果的公正性与权威性。对于重大事故,点云数据还可导入虚拟仿真系统,重现事故发生时的车辆运动轨迹与视线盲区,为安全改进提供精准方向。
随着5G与边缘计算技术的发展,智慧路口建模正向实时动态演进。通过路侧单元实时更新点云数据,结合AI算法可识别占道施工、违停等异常事件,并自动触发预警信息推送至管理平台。这种实时感知与快速响应能力,能有效提升路口管理的时效性,减少交通拥堵与安全隐患。未来,随着车路协同技术的普及,路口三维模型将与自动驾驶车辆实时交互,提供超视距感知支持,助力城市交通向“零事故”目标迈进。
从静态数据采集到动态孪生管理,三维扫描与3D点云技术正在重新定义城市路口的数字化治理范式。这项技术不仅提升了交通管理的精细化水平,更为智慧城市构建了可扩展的“空间数字底座”,推动交通系统向安全、高效、绿色的方向持续进化。