 案例详情
案例详情

 19872700032
19872700032
19872700032
19872700032
 新闻资讯3d建模3d点云扫描
新闻资讯3d建模3d点云扫描 官方公告
官方公告 行业资讯
行业资讯 技术分享3d高斯泼溅乡镇倾斜摄影电站倾斜摄影三维数据采集城市倾斜摄影交通倾斜摄影工厂倾斜摄影校园倾斜摄影景区3d点云扫描园区3d点云扫描园区倾斜摄影装饰品效果图企业/展品3D视频问题列表
技术分享3d高斯泼溅乡镇倾斜摄影电站倾斜摄影三维数据采集城市倾斜摄影交通倾斜摄影工厂倾斜摄影校园倾斜摄影景区3d点云扫描园区3d点云扫描园区倾斜摄影装饰品效果图企业/展品3D视频问题列表 变电站3D建模
变电站3D建模 交通3d点云扫描三维场景建模
交通3d点云扫描三维场景建模 产品3d点云扫描发电厂3d建模光伏3d建模风电场3D建模储能站建模水电站3d建模地产倾斜摄影机房3d建模景区倾斜摄影家具建模设备建模建筑建模产品建模展馆建模爆炸效果图剖面效果图装修效果图建筑效果图鸟瞰效果图
产品3d点云扫描发电厂3d建模光伏3d建模风电场3D建模储能站建模水电站3d建模地产倾斜摄影机房3d建模景区倾斜摄影家具建模设备建模建筑建模产品建模展馆建模爆炸效果图剖面效果图装修效果图建筑效果图鸟瞰效果图 VR校园全景充电桩3d建模3D可视化建模园区建筑建模工业设备建模文化旅游建模电站能源建模工厂车间建模电商三维建模天猫淘宝建模京东AR建模产品3D建模文物3d点云扫描倾斜摄影建模VR线上展会汽车3D展馆VR艺术展馆VR党建展厅VR博物馆精品案例3D可视化建模园区建筑建模工业设备建模变电站3D建模工厂可视化建模电商三维建模阿里躺平建模京东AR建模产品3d建模文物扫描建模倾斜摄影3D可视化建模电站3d点云扫描工厂3d点云扫描360环物拍摄全景VR拍摄3D效果图制作交通运输建模家具效果图产品效果图工厂效果图医疗健康建模医疗设备建模医疗场景建模工业园区建模办公园区建模商业园区建模住宅园区建模教育园区建模物流园区建模制造业3D建模重工业3D建模轻工业3D建模环保业3D建模
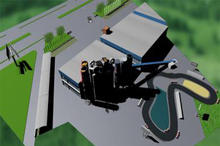
VR校园全景充电桩3d建模3D可视化建模园区建筑建模工业设备建模文化旅游建模电站能源建模工厂车间建模电商三维建模天猫淘宝建模京东AR建模产品3D建模文物3d点云扫描倾斜摄影建模VR线上展会汽车3D展馆VR艺术展馆VR党建展厅VR博物馆精品案例3D可视化建模园区建筑建模工业设备建模变电站3D建模工厂可视化建模电商三维建模阿里躺平建模京东AR建模产品3d建模文物扫描建模倾斜摄影3D可视化建模电站3d点云扫描工厂3d点云扫描360环物拍摄全景VR拍摄3D效果图制作交通运输建模家具效果图产品效果图工厂效果图医疗健康建模医疗设备建模医疗场景建模工业园区建模办公园区建模商业园区建模住宅园区建模教育园区建模物流园区建模制造业3D建模重工业3D建模轻工业3D建模环保业3D建模在当今数字化时代,停车场的智能化管理已经成为城市发展的重要组成部分。点云扫描建模技术的应用,为停车场的规划、设计和管理提供了全新的视角和方法。本文将深入探讨停车场点云扫描建模的关键步骤,以及如何通过这一技术打造智能化停车场。
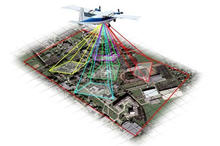
数据采集是停车场点云扫描建模的第一步,也是最关键的一步。这一阶段需要使用专业的激光扫描设备,对停车场的内部和外部进行全面扫描。在采集数据时,需要注意以下几点:
确保扫描设备的准确性和稳定性,以获取高质量的点云数据。
对停车场的各个区域进行全面扫描,包括停车位、通道、出入口等。
注意采集数据的密度和分辨率,以满足后续建模和分析的需求。
采集到的点云数据需要进行处理,以去除噪声和异常值,并进行数据配准和拼接。这一阶段的关键步骤包括:
数据滤波:去除点云中的噪声和异常值,提高数据质量。
数据配准:将不同视角和位置采集到的数据进行配准,统一坐标系。
数据拼接:将配准后的点云数据拼接成完整的停车场模型。
在数据处理完成后,需要使用专业的三维建模软件,如Autodesk Revit、SketchUp等,进行停车场的三维建模。这一阶段的关键步骤包括:
模型构建:根据点云数据构建停车场的三维模型,包括建筑物、停车位、通道等。
细节添加:为模型添加细节,如道路标记、停车位编号、路灯等。
材质贴图:为模型添加材质和贴图,使其更加真实。
停车场点云扫描建模的最终目的是为了实现智能化管理。这一阶段需要将三维模型与智能化系统集成,实现以下功能:
车位管理:通过点云模型实现车位的实时监测和管理。
车辆导航:利用三维模型为车辆提供精确的导航服务。
安全监控:通过点云模型实现停车场的安全监控和预警。
停车场点云扫描建模是一个动态的过程,需要定期更新和维护。这一阶段的关键步骤包括:
数据更新:定期对停车场进行扫描,更新点云数据和三维模型。
模型优化:根据实际情况对三维模型进行优化和调整。
系统维护:对智能化系统进行维护和升级,确保其正常运行。

通过以上关键步骤,停车场点云扫描建模可以为停车场的规划、设计和管理提供强有力的支持。这一技术的应用,不仅可以提高停车场的管理效率,还可以为用户提供更加便捷、安全的停车体验。随着技术的不断进步,停车场点云扫描建模将在未来的城市发展中发挥越来越重要的作用。